Our world of conventional hard robotics is not easily miniaturized or made compatible for handling delicate systems. It cannot currently compete with our biological systems, such as out limbs, in delicate handling and compliant manipulation. Current efforts to produce soft robotics typically makes use of composite materials https://doi.org/10.1002/aisy.202200280
What is happening now
Soft materials, by their nature, are compliant and deformable. While this softness enables safe interaction and adaptability, it also limits the amount of force that can be generated. As a result, soft robotic systems typically produce lower forces than traditional rigid robots. In addition, the intrinsic viscoelastic response of soft materials often leads to slower actuation speeds. Compared to hard robotic systems, soft robots generally exhibit reduced response rates and bandwidth, which restricts their performance in fast or high-load tasks
Our Vision for our Research
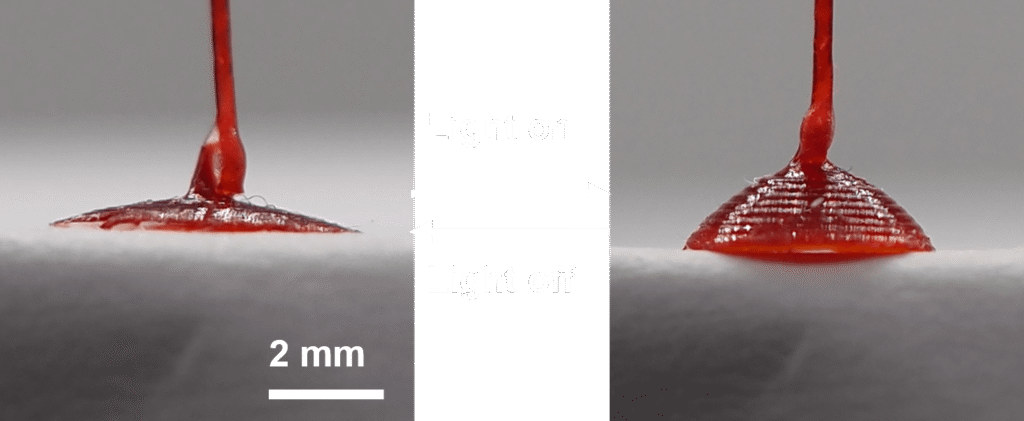
To address these limitations, we take inspiration from nature Instead of relying on large actuation forces, we mimic the octopus suction cup and developed a light-responsive suction cup that generates negative pressure for strong adhesion. This design enables the suction cup to lift objects up to 500× its own weight, and to grip reliably on both flat and curved surfaces. https://doi.org/10.1002/aisy.202200280
To increase reaction speed, we draw inspiration from the snap-through phenomenon observed in nature, such as the rapid closure of the Venus flytrap. Rather than relying on slow, continuous deformation, our approach exploits bistable structures with two stable equilibrium states. When an external stimulus drives the system beyond a critical instability threshold, elastic energy accumulated over time is released abruptly, resulting in fast, large-amplitude motion. https://doi.org/10.1016/j.eml.2024.102149
Researchers
Meet the people working on this project. For any questions are inquiries contact them.